We start by defining the input temperature states using “membership functions”:
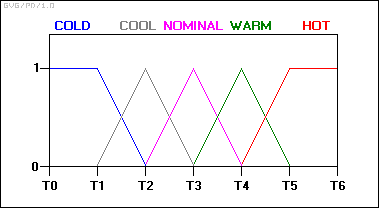
With this scheme, the input variable’s state no longer jumps abruptly from one state to the next. Instead, as the temperature changes, it loses value in one membership function while gaining value in the next. In other words, its ranking in the category of cold decreases as it becomes more highly ranked in the warmer category.
At any sampled timeframe, the “truth value” of the brake temperature will almost always be in some degree part of two membership functions: i.e.: ‘0.6 nominal and 0.4 warm’, or ‘0.7 nominal and 0.3 cool’, and so on.
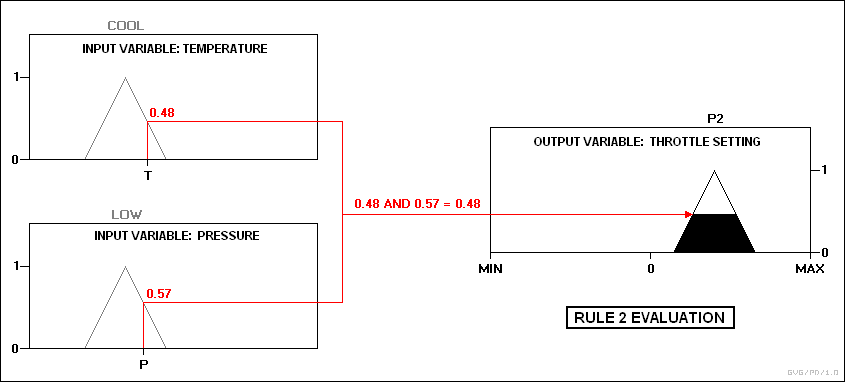
In practice, the controller accepts the inputs and maps them into their membership functions and truth values. These mappings are then fed into the rules. If the rule specifies an AND relationship between the mappings of the two input variables, as the examples above do, the minimum of the two is used as the combined truth value; if an OR is specified, the maximum is used. The appropriate output state is selected and assigned a membership value at the truth level of the premise. The truth values are then defuzzified. For an example, assume the temperature is in the “cool” state, and the pressure is in the “low” and “ok” states. The pressure values ensure that only rules 2 and 3 fire:

https://en.wikipedia.org/wiki/Fuzzy_control_system